












|
Welkom,
Gasten
|
In deze sectie horen alleen topics welke een project beschrijven. Hiervoor gelden bijzondere regels. De beschrijving van het project staat centraal, reacties van zowel de Topic Starter (TS) als andere leden zijn alleen toegestaan indien deze rechtstreeks betrekking hebben op de projectinhoud. Zie ook de forumregels die hierop van toepassing zijn.
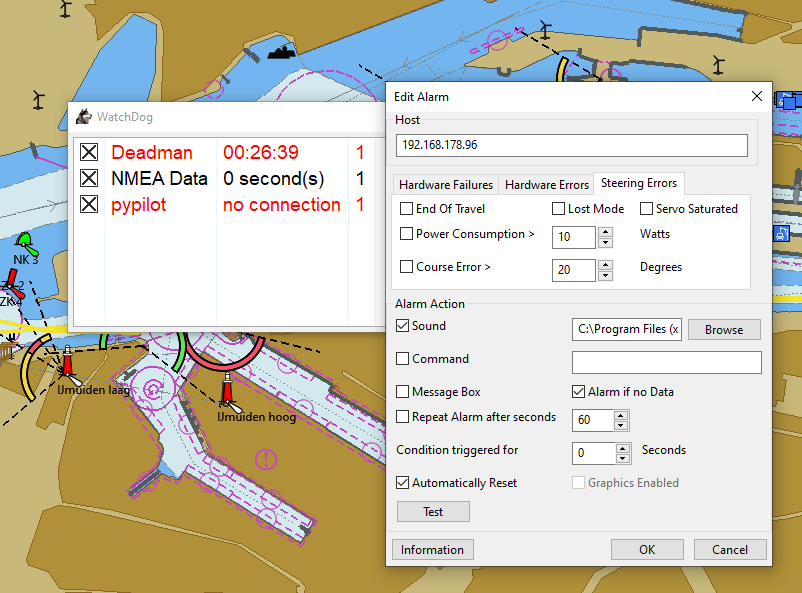
Onderwerp: PyPilot, de stuurautomaat van OpenPlotter
PyPilot, de stuurautomaat van OpenPlotter 07 juli 2019 09:42 #1061454
|
|
|

PyPilot, de stuurautomaat van OpenPlotter 07 juli 2019 12:47 #1061482
|
|
|

PyPilot, de stuurautomaat van OpenPlotter 07 juli 2019 13:50 #1061492
|
|
|

PyPilot, de stuurautomaat van OpenPlotter 28 juli 2019 23:44 #1067154
|
|
geloof niet alles wat je denkt
|





PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 04:46 #1067155
|
|
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 06:26 #1067168
|
|
Ongevraagd advizeur
|

PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 06:31 #1067169
|
|
|

PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 08:09 #1067188
|
|
|

PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 08:53 #1067198
|
|
geloof niet alles wat je denkt
|

PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 09:05 #1067201
|
|
geloof niet alles wat je denkt
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 09:26 #1067207
|
|
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 09:27 #1067208
|
|
geloof niet alles wat je denkt
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 10:50 #1067229
|
|
geloof niet alles wat je denkt
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 10:51 #1067230
|
|
Ontwerper van de RoosMux, en andere apparaatjes.
www.viax.nl It's been said that a boat is a vessel continually looking for ways to sink itself.. |

PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 11:47 #1067239
|
|
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 12:33 #1067254
|
|
Ongevraagd advizeur
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 12:36 #1067256
|
|
Ongevraagd advizeur
|
PyPilot, de stuurautomaat van OpenPlotter 29 juli 2019 16:48 #1067312
|
|
|
PyPilot, de stuurautomaat van OpenPlotter 13 aug 2023 12:38 #1501841
|
|
geloof niet alles wat je denkt
|
PyPilot, de stuurautomaat van OpenPlotter 14 aug 2023 07:03 #1501990
|
|
|

PyPilot, de stuurautomaat van OpenPlotter 14 aug 2023 11:37 #1502058
|
|
geloof niet alles wat je denkt
|


