Baasklusje schreef :
ik demp alleen de output. De NMEA uit GPS en windset komt zo'n beetje elke 2 seconden binnen in de PC, dus daar is al wat ruis uit verdwenen.
Interessant, dit raakt aan de sampling theorie. Essentieel te begrijpen daarij is het Nyquist theorema en daarmee samenhangende aliasing: de
hoogste frequentie die bemonsterd kan worden is de
halve samplefrequentie. Elke component in het originele (analoge) signaal met hogere frequentie dan dat geeft fouten (geen random ruis maar systematische vervorming) in het gesampelde signaal. Dit zijn zogenaamde aliasing producten en komen gespiegeld terug benéden de Nyquist frequentie.
In het geval van een 2 s sampletijd mag je analoge signaal dus geen componenten met een periodetijd sneller dan 4 s bevatten. Die digitale filters in Tactictool zijn leuk bedacht, maar komen te laat in de signaalverwerking helaas. Wat je in principe moet doen is het analoge signaal (in je windset, GPS etc) pre-filteren (via een analoog anti-aliasing filter) zodat alle componenten sneller dan 4 s. weggefilterd worden vóórdat er bemonsterd wordt. Kijk dus even of dat kan in je windset, GPS etc: hopelijk wordt niet alleen de output naar de klok gefilterd, maar wordt de NMEA output betrokken op dat gefilterde signaal. Dit filter vormt dan je anti-aliasing filter. Het signaal ná die filtering mag je bemonsteren. Eigenlijk bemonstert je windset en GPS trouwens, aangezien de NMEA zinnen samples zijn van het interne (veel snellere) signaal ín die apparaten.
Die je dit niet, dan ontstaan aliasing fouten: stel dat je windset frequenties met een periodetijd van 3 s bevat (sneller dan de toegestane 4 s dus). Als je dit signaal niet pre-filtert dan vind je deze terug in het bemonsterde signaal, gespiegeld rondom de Nyquist frequentie. In dit geval vind je die signalen met een periodetijd van 3 s dus terug als signalen met een periodetijd van 6 s. Je bemonsterde signaal is dus vervormd en je ziet frequenties die er nooit geweest zijn. Post-filtering zoals Tactictool doet helpt daar niet tegen...
Als BK opmerkt dat 4 s duurt voordat de boot "steady state" heeft bereikt na een verandering van AWA, AWS etc, dan kun je dus stellen dat 4800 Baud eigenlijk op de limiet zit qua snelheid. NMEA2000 werkt met 10 en soms zelfs 20 Hz, waarbij dit probleem een stuk minder speelt. Dan mag je wél die digitale filters gebruiken, maar om de dynamica van je boot te matchen: de performance berekening is dan gesynchroniseerd met de boot en op elk moment (niet alleen steady state) geldig.
Ik denk dat als Tactictool uitgebracht zou worden voor NMEA2000 en je deze filters correct instelt, de performance grafiekjes een stuk minder ruisig zullen tonen en er veel minder "menselijke interpretatie" nodig is.
Niet dat dat een groot probleem is en BK is erg ervaren in deze interpretatie, maar wellicht interessant om in het achterhoofd te houden.
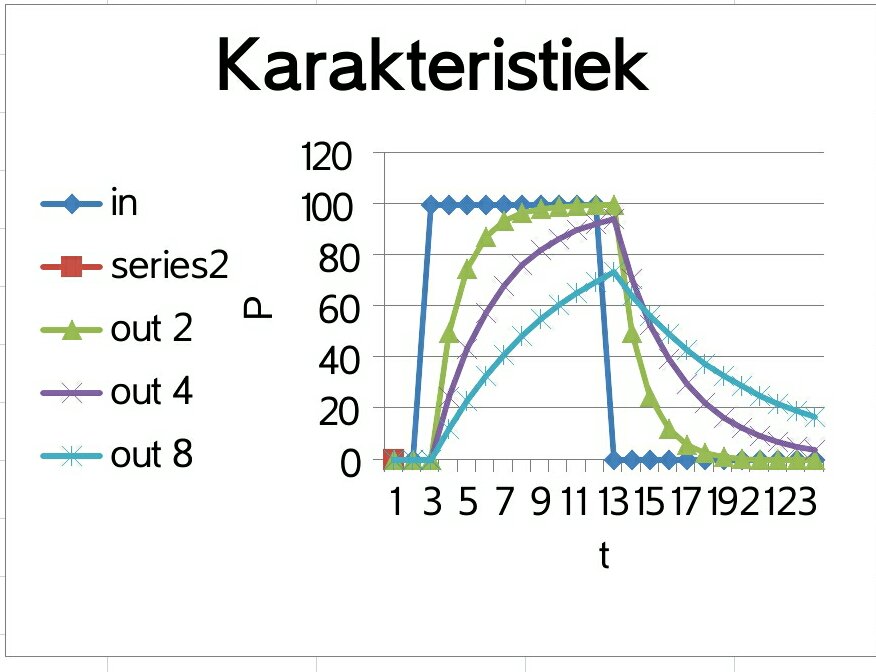
Hier wat plaatjes in het kader "meer dan 1000 woorden"
In het frequentiedomein: het frequentiespectrum F>Fn komt terug in het bemonsterde singaal.
In het tijdsdomein: het signaal sneller dan Fn wordt bemonsterd als een trager signaal (wat nooit aanwezig is geweest in het oorspronkelijke signaal).
Edit: moderne windsets en GPSsen werken intern natuurlijk ook digitaal, echter de klok daarin is vele malen sneller dan de NMEA output, zodat deze apparaten als quasi-analoog werken.