Die van mij (een Airmar DST810 Smart Gen I) geeft nooit problemen en geen fouten op diep of ondiep water, maar vind het interessant meer van de werking te begrijpen. Daarom dit draadje.
www.furuno.fr/docs/DOCUMENTATI...MMERCIALE/DST810.pdf
Dit apparaat gebruikt ultrageluidsfrequenties van 235 kHz. Bij een geluidssnelheid van 1500 m/s geeft dat een golflengte van ongeveer 6,5 mm.
Apparaat is in staat tussen 0,5 en 100 meter diepte te meten.
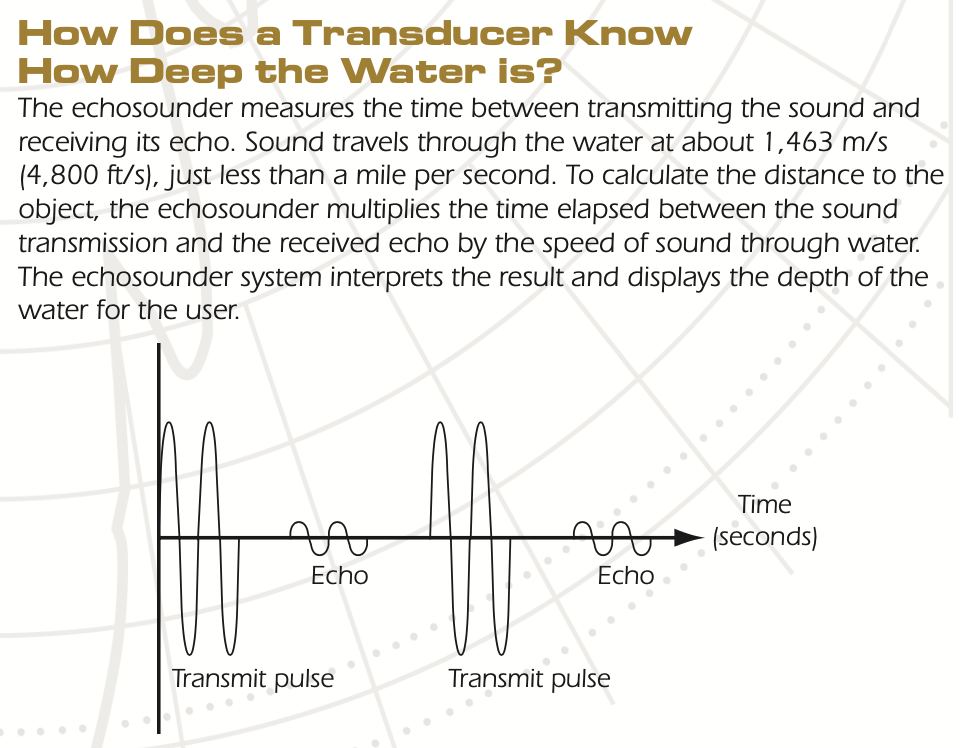
Tussen de “ping” (ik begrijp een kort pulstreintje met een patroon dat het apparaat bij reflectie herkent…) en reflectie betekent dit een reistijd tussen en 0,7 en 133 ms.
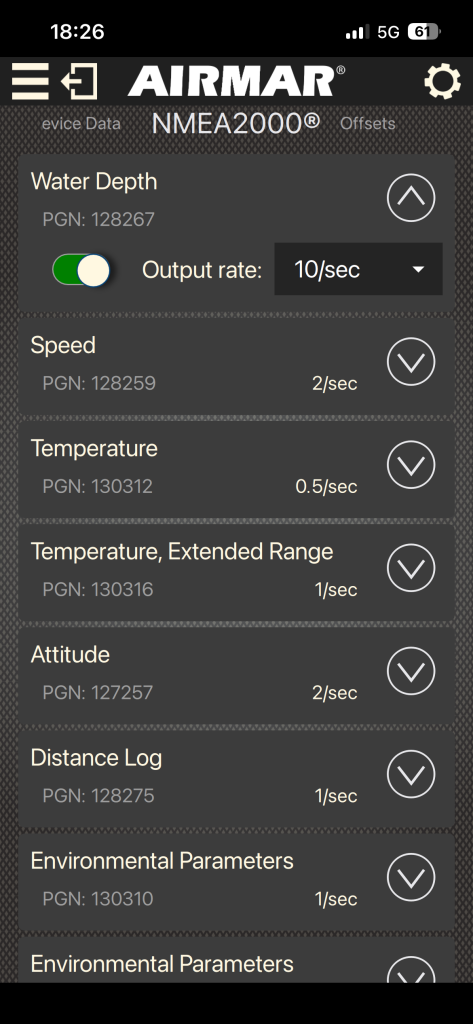
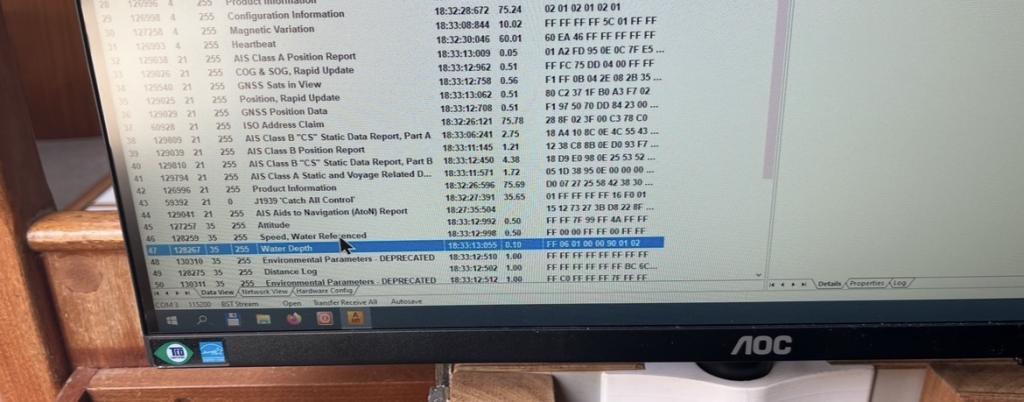
Toch geeft dit apparaat slechts elke s een update. Op de kant echter hoor ik de sensor veel sneller dan eens per seconde tikken. Zelfs indien het apparaat is gebouwd om geen nieuwe puls te zenden voordat de reflectie van de vorige puls terug-ontvangen is, zouden deze pings elkaar met bijna 7 Hz mogen opvolgen (bij 100 meter; in ondieper water kan deze frequentie evenredig hoger liggen).
Wie weet hoe deze dieptemeter dat doet? Zal eens luisteren hoeveel pings er in ondiep water uitgezonden worden.
Aangezien er slechts elke s een meting beschikbaar wordt gesteld, wat gebeurt er met de tussenliggende metingen? Worden die gebruikt om de nauwkeurigheid te verhogen?