Beauty schreef :
zijn de gegevens op je polar als TWD en TWS nu de 'echte TWD en TWS zoals in het eerdere draadje of bedoelen ze in je polar met True Wind de Geo Wind? Heeft nogal wat consequenties als het inderdaad de Geo Wind is, die velen als True beschouwen. Dus is je polar ten opzichte van het (stromende) wateroppervlak of ten opzichte van het land/bodem?
Polar volgt het "moving carpet" verhaal! Daar praat je dan ook over TWA (
angle, tov je boot) en TWS (ook tov je boot). TWD is de wind
richting (kompas) niet
angle van de wind. Er zijn groepen die vinden dat TWD is zoals het KNMI voorspelt (tov grond) en er zijn groepen (het B&G stuk bv) die vinden dat TWD de kompasrichting is die de wind waait over je moving carpet. Voor je polar heb je de TWD echter niet nodig...
TWD gebruik je dus niet in de performanceberekening (ik wel, in de tweede vorm, als een soort state-estimator, maar dat is een truukje wat te ver gaat voor dit draadje).
TWA, TWS en STW zijn tov je boot/het water waar ie op drijft en gebruik je wel. Het maakt daarbij niets uit of je bv 4 knopen STW vaart door stilstaand water of dat doet met 4 knopen stroom tegen, mee of dwars. Uiteraard heeft dat wel invloed op je snelheid en koers over de grond, maar daar gaat het hele performance verhaal niet over. Het dient er toe om een referentie te hebben voor veranderingen in je trim (niet je al of niet stromingsregelateerde tactiek).
In de basis werkt bovenstaand al prima en er is geen ander dan BK die dat beter laat zien hoe dat in de praktijk werkt. Met een relatief eenvoudig systeem. En het blijft relatief: foutjes in je meetbrief of sensoren zijn meestel systematisch: ik haal onder bepaalde condities en koers bv max 95%, dus bv 5.7 knoop ipv 6.0. Als ik een dag later onder precies dezelfde condities 90% haal, ga ik trimmen en kom weer op die 95%. Voor mij is die 95% dan eigenlijk 100%: mijn boot gaat nooit harder, wat ik ook probeer.
Een performance berekening is een hulpmiddel: het leert je niet te zeilen en kan zeker de basis niet zijn om te leren zeilen. Ik zie het als een trimhulp, kun je zonder niet zeilen dan kun je met nog steeds niet zeilen. Ben je echter al fanatiek aan het trimmen en vind dit leuk, dan kan het een extra hulpmiddel zijn om de effecten van trimveranderingen te meten onafhankelijk van een gelijktijdige verandering van de wind met bv 2 knopen (waardoor je ook sneller zou kunnen gaan). Het kan je dus wel leren beter (en bewuster) te trimmen.
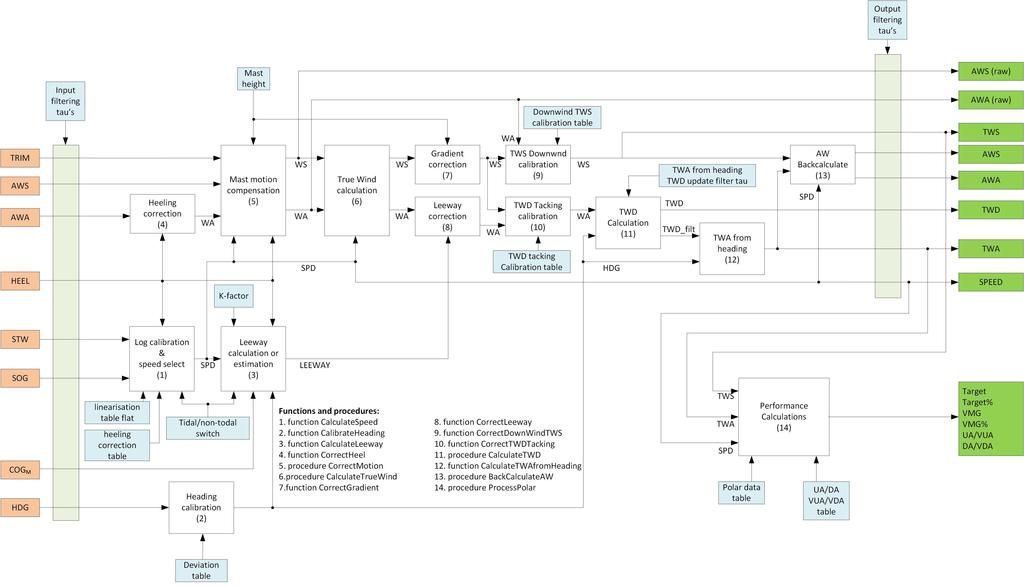
Wil je die hierboven genoemde systematische fouten eruit hebben dan kun je een kant-en-klaar race performance systeem kopen (bv B&G Hydra, Hercules, NKE, Sailmon, Ockam), of zelf gaan hobbyen. Ik pas onderstaande correcties toe bv. Dat is een boel gecalibreer (en hartstikke leuk om mee bezig te zijn vind ik). Zie rekenstruktuur hieronder. Alles wat je echt nodig hebt staat in het blok rechts-onder. De rest dient zuiver om deze inputs (speed, TWA, TWS) zo nauwkeurig mogelijk aan te bieden. Dat
hoeft echter niet: in de praktijk heft het effect van drift dat van upwash nagenoeg op; ook de rest is "nice to have". Een systeem zoals BK gebruikt op basis van de "ruw berekende" TWA, TWS en STW werkt voldoende om nuttig te (kunnen) zijn...
La Mavare schreef :
Dat op stromend water de electronica het moeilijk heeft? Moet ik dat weer uitleggen? Zie het mooie voorbeeld wat Beauty heeft gegeven.
Toch daag ik je uit het zelf ook eens proberen uit te leggen; ik heb namelijk het gevoel dat Beauty ook nog wat "op zoek" is. Dus waarom heeft de electronica die je nodig hebt voor een performance berekening het moeilijker op stromend water dan op stilstaand water volgens jou? De methode is precies gelijk namelijk...