3Noreen schreef :
Log geeft bij gelijke SOG op de motor varend een andere STW dan zeilend. Mogelijk door pitch of het aanvoeren van schroefwater. Alle metingen die ik doe op de motor varend gebruik ik daarom niet.
Hmmm, interessant en aannemelijk: zou inderdaad temaken kunnen hebben met de aanzuiging van schroefwater, al neem ik aan dat je schroef best een eind achter het log zit. Waar ik zelf aan zit te denken is dat de romp, wanneer aangedreven door de zeilen, anders in het water ligt dan tijdens het motoren. Motor grijpt aan ergens achter in de boot op het vlak terwijl de voorstuwing vanuit het tuig voor het midden an de boot plaats vind en dan op (ik noem maar wat) 6 meter hoogte. Dan zou er ook een draaimoment kunnen ontstaan in voorwaardse richting, waardoor de romp vooraan (en bij het log) dieper komt te liggen en de kont omhoog. Op de motor is dat andersom.
Maar als dat wáár is dan zou dat toch door "trim" te meten moeten zijn?
3Noreen schreef :
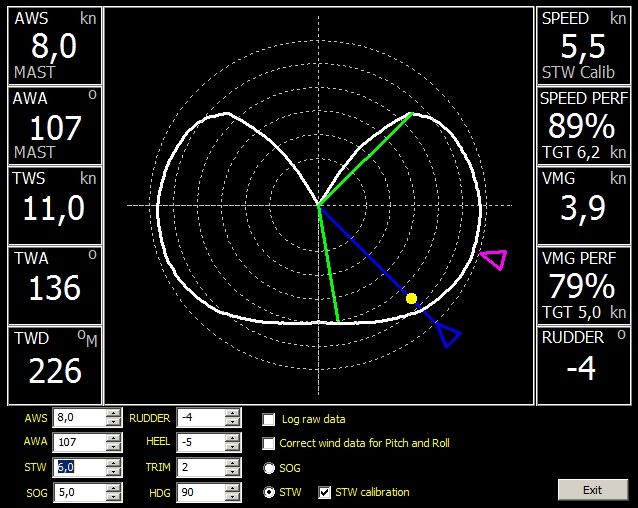
-Er is een scherpe knik in de afwijking van het log bij het bereiken van de planeer snelheid.
Ja, dan zal er een boel veranderen in de lokale stromingscondities: boot begraaft zich (bij jou niet zo sterk!) in boeg- en hekgolf en als jij (ik niet!) nog harder gaat zal de boeg juist een stuk op/over de golf gaan varen.
Lukt het om die knik mee te calibreren? Snelheid waarbij dat plaats vindt ligt toch redelijk vast?
3Noreen schreef :
-Drift zie ik als een snelheid haaks op de heading. Is bij mij redelijk onafhankelijk van de snelheid die gevaren wordt. Kan heel anders zijn bij lift gevende zwaarden e.d. Bij mijn boot is het in relatie met wind speed en golfslag. Vreemd genoeg maakt de windhoek weinig uit. Je vermoed hier een sinus. Echter kan ik die niet ontdekken.
Slim bedacht! Toch moeten jouw rompen ook lift geven; ik neem temiste aan dat je geen gigantische drifthoeken hebt! Misschien lijkt jouw boot wat dat betreft meer op een langkieler; die heeft ook niet echt "hydrofoils" onderwater, maar loopt toch hoogte. Zou dat "langkiel lifteffect" relatief onafhankelijk zijn van watersnelheid?
3Noreen schreef :
-Zelf gebruik ik ook een schakelaar SOG/STW Echter ben ik aan het broeden op het idee een stroom vector uit te rekenen die ik over een lange tijd kan middelen. De stroom veranderd niet bij koerswijzigingen en is mogelijk redelijk constant over een periode van enkele minuten. Met deze stroom vactor kan de SOG gecorrigeerd tot een soort STW.
Hier kom ik op terug! Vanmorgen gelezen dat Sailmon iets soortgelijks doet met de optie "TWA from Heading"
3Noreen schreef :
- Verschillende gps’n geven verschillende SOG/COG. Mogelijk door andere plaats op het schip ? Of software verschillen in de gps.
Geen idee: mijn SOG uitlezing is superstabiel en heb ik niet zien driften. In absolute waarde nooit vergelen met een afstandsmeting (omdat ik niet meer ouderwets navigeer in de praktijk). Zal eens gaan meten.
Ik zou terug komen op, zoals je voorstelt, het schatten van de stroming en deze vastleggen/stabiliseren onder de aanname dat die de komende 5-10 min (zou mijn idee zijn) niet verandert. Ik neem aan dat je software deze stroming nog steeds momentaan blijft schatten en dat deze schatting de traag gefilterde versie update? Je zou volgens mij dan inderdaad de door jou "tijdelijk bevroren" waarheid kunnen gebruiken, waardoor je uit kunt gaan van COG en SOG!
Dit is ongeveer het idee achter toestandschatters zoals die in de control theorie gebruikt worden.
Sailmon doet dit volgens mij óók, maar ben er nog niet helemaal achter hoe precies. Heb wat ideeën maar post die pas als ik daar verder mee ben.
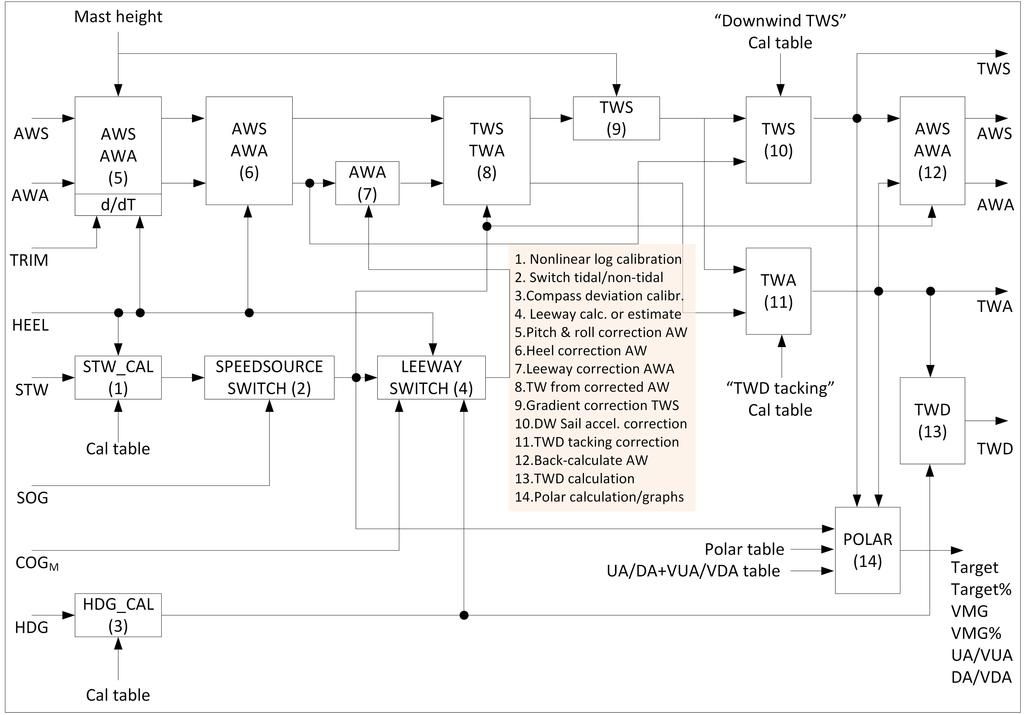
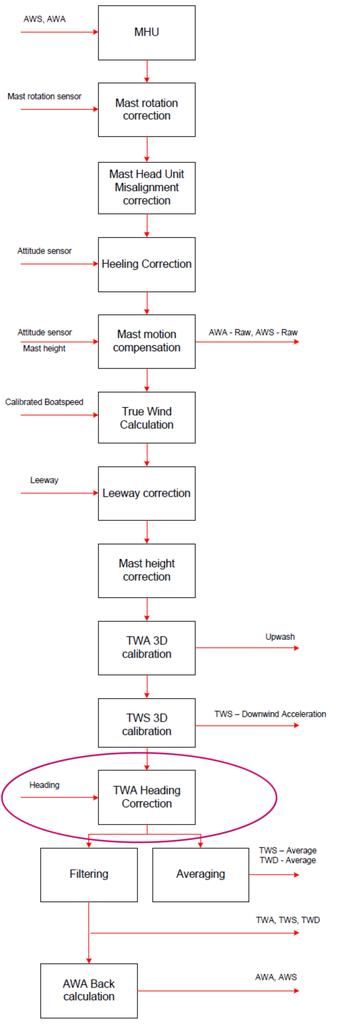
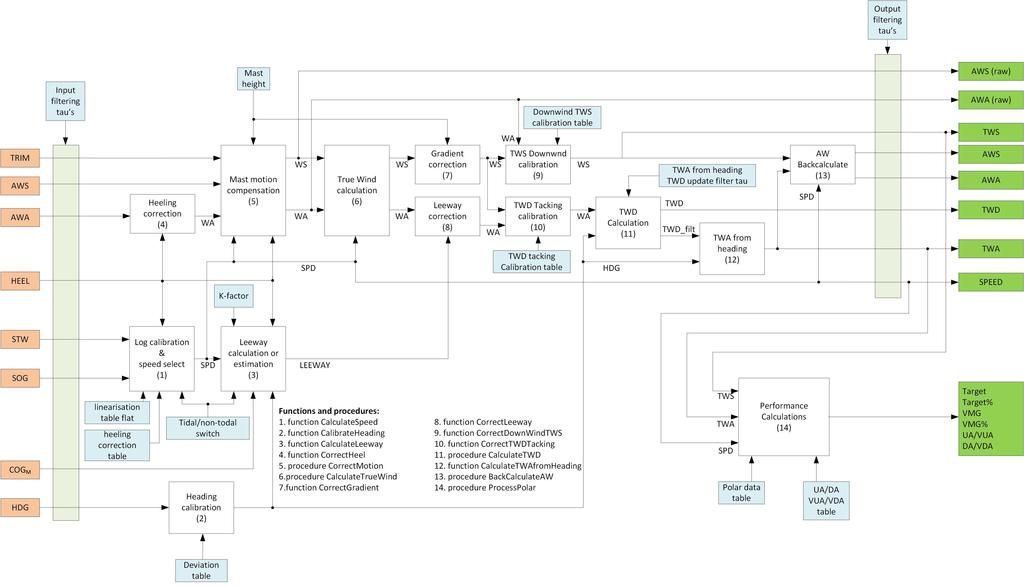
Sailmon rekent als hieronder (in vergelijking met mijn struktuur vind éérst de hellingscompensatie plaats en dán pas de pitch&roll. Bovendien vind leeway correctie plaats in het true wind domein ipv daarvoor). Anyway:
Niets nieuws verder, behalve het paars omcirkelde blok dus. Daar wordt over geschreven:
If TWA heading correction is enabled, the next stage [het paarse blok] will use the heading sensor to calculate a very stable while still highly dynamic TWA
Enable TWA Heading Correction: Enabling this value will introduce the current heading from the compass sensor to the TWA and will significantly increase the stability of the displayed TWA. It is recommended that you enable this function
A very powerful feature of the Sailmon system is that true wind angle can be corrected for heading. This means, the actual true wind angle is connected to your heading value. As soon heading changes, the true wind angle will change immediately. If enabled, Sailmon can apply very efficient filtering for the True Wind values. True Wind Angle will be incredibly stable during sailing while still responding immediately during course changes, tacks and gybes.
We strongly recommend enabling this feature.
Wat zou daar gebeuren? Ik verwacht niet dat hier van een echt feedforward model gebruik wordt gemaakt: dit zou nooit goed te tunen zijn en dus niet robuust in de praktijk. Wat wellicht wél gebeurt:
- Elk samplinginterval wordt TWA en daaruit TWD (=HDG + TWA) opnieuw berekend maar niet weergegeven
- Hieruit wordt een traaggefilterde versie van TWD, bv met tijdsconstande van 2 min "TWD_2" bijgehouden
- Vanaf dat moment wordt de weergegeven en in de polar gebruikte TWA berekend op basis van de kompaskoers en TWD. Dus TWA = TWD_2 - HDG.
- TWA reageert dan live op koeswijzingingen, overstagjes etc met een minimum aan ruis
- Snelle windshifts (welke geen ruis zijn) zie je dan pas vertraagd terug, maar de AWA is nog steeds live
Zou het zo werken? Of anders?
Lijkt dit op wat jij van plan bent of was dit een verkeerde associatie?
Is dit iets om te implementeren?
PS: Staat er nu
corrected of
connected? Indien "connected" dan zou er iets kunnen gebeuren als ik opsomde, indien "corrected" dan zou er wel sprake kunnen zijn van feed-forward. Dat lijkt me niet aannemelijk: je dient dan een universeel inverse model te hebben van een stap in de heading naar de reactie van de windvaan. Dat valt m.i. onmogelijk te doen en is ook veel "geavanceerder" dan wat ik tot dusver gezien heb.
Robuustheid lijkt de norm te zijn (en terecht...)