Heren, (ja helaas, geen vrouwen hier tot nu toe?)
Ik maak mijn eigen autopilot, en heb de code van pcnautic/sean in de code van Sean. De belans die je zoekt bij de gains is een afweging tussen stroomverbruik/geluid en precisie. Ik zou 2 graden afwijking upwind en 4 graden ruime wind accepteren ten behoeve van stroomverbruik.
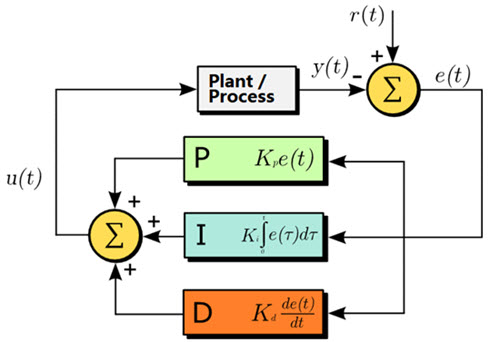
Wat is P?
Om conreet de vraag te beantwoorden, wat is P. Dat is de Proportionele. Dus wanneer de ingesteld koers 90 is en het compass geeft 80 dan is P -10. Als je aangeeft dat de boot sneller moet reageren op een ingestelde op een koersafwijking ( of wijziging)dan moet je de P omhoog zetten.
Wat is I?
Deze staat standaard op 0, omdat deze op boten niet nodig zou moeten zijn. een PID controller is een algemene methode en die I is noodzakelijk bij andere systemen zoals temperatuur of een cruisecontrol. @nachtvlinder, hoeveel graden bleef de boot minuten lang van koers toen je nog geen I had?
Gains leren.
Ik heb een eerste proefje gemaakt met het tunen van parameters in een simulator. Dit is work in progress en meer bedoeld voor mijzelf. Je kan een aardig idee hier krijgen:
pieteroskam.nl/autopilot/ Hier zitten nog niet alle gains in. Let wel dat de gains erg boot specifiek zijn. Ook de omstandigheden bepalen hoe je stuurt.
@Eclips. Pitch en Roll zijn belangrijk om je compass koers te berekenen alsmede de Rate of Turn!
het compass meet de magnetisch velden, maar als de boot 45 graden helt, dan gaat het magnetisch veld anders door de sensor.
Dat is idem voor de Gyroscoop. de autopilot heeft gyroscopen in 3 assen XYZ. Als de boot horizontaal is gebruik je louter Gyro Z. Stel dat de boot 45 graden helt dan doe je GyroZ * cos(45) + sin(45) * Gyro X. Je moet natuurlijk ook de pitch meenemen.
Je zou de boot best op helling kunnen laten sturen, dat voornamelijk van toepassing bij mijn wedstrijdboot, een F18 Catamaran, daarbij stuur je downwind op helling in de boot zodat 1 romp net boven het water is
")
. Ik zie in andere boten er niet echt het voordeel in.